1. 소성이 발생한 축
비틀림 하중을 받고 있는 축에 큰 하중이 작용하여 소성 변형이 발생하는 경우를 살펴보자. 먼저 변형이 탄성 영역에 있을 때는 아래와 같은 전단 응력과 토크 사이의 관계를 이용했다.
$$ \tau = \frac{T}{I_p}r $$
전단 변형률(shear strain)과 비틀림각(torsional angle) 사이의 관계는 아래와 같다.
$$ \gamma = r\cdot\frac{d\Phi}{dx} = r\beta $$
토크를 받는 축에 소성이 발생한다면 가장 큰 전단 응력이 작용하는 최외각에서부터 소성이 시작될 것이다. 그러나 일단 소성이 발생한 영역에서는 더 이상 위의 전단 응력과 토크 사이의 관계식이 성립하지 않는다. 따라서 다시 원래 전체 토크를 구하던 식으로 되돌아가야 한다.
$$ T = \int_A \tau rdA $$
2. 재료
재료는 완전 탄소성(elastic/perfectly plastic) 재료로 가정한다.
$$ \tau_y = G\gamma_y $$
$$ G = \frac{E}{2(1+\nu)} $$

3. 탄소성 비틀림 (Elastic/Plastic Torsion)
3.1. 탄성 한계 상태 (Elastic Limit State)
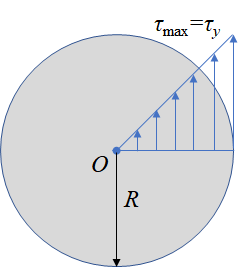
소성 변형이 생기기 바로 직전까지 변형한 경우는 축에 발생하는 최대 전단 응력이 전단 항복 강도가 된다.
$$ \tau_{\text{max}} \Rightarrow \tau_y $$
이때 축에 작용하는 토크는 탄성 한계 토크(elastic limit torque) 혹은 항복 토크(yield torque)가 된다.
$$ T \Rightarrow T_y $$
아직 축은 탄성 영역에 있으므로 전단 응력과 토크 사이의 관계식은 여전히 유효하다.
$$ \tau_y = \frac{T_y}{I_p}r $$
$$ T_y = \tau_y\cdot\frac{r}{I_p} $$
\begin{align} \therefore T_y &= \tau_y\cdot\frac{\pi}{2}R^3 \\\\ &= \tau_y\cdot\frac{\pi}{16}d^3 \end{align}
3.2. 탄소성 상태 (Elastic/Plastic State)
탄소성 상태는 축에 작용하는 토크가 항복 토크보다 큰 경우를 말한다. 이때는 축에 탄성 영역과 소성 영역이 공존하게 된다.
축의 전단 변형률은 아래와 같다. 여기에서 $r_e$는 탄성 영역과 소성 영역의 경계이다.
\begin{align} \gamma &= \frac{r}{r_e}\gamma_y \\\\ \gamma_y &= \frac{\tau_y}{G} \end{align}

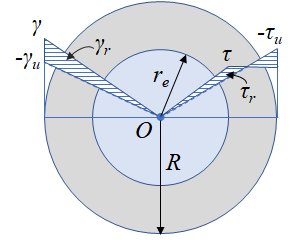
축의 전단 응력은 아래 그림 4에 나타낸 것과 같이 후크의 법칙이 여전히 적용되는 탄성 영역과 항복 강도만큼만 응력이 작용하는 소성 영역으로 구분할 수 있다.

탄성 영역($0\leq r\leq r_e$)에서는 후크의 법칙이 작용하므로 아래처럼 쓸 수 있다.
\begin{align} \tau &= G\gamma \\\\ &= G\left(\frac{r}{r_e}\gamma_y\right) \\\\ &= \frac{r}{r_e}\tau_y \end{align}
소성 영역($r_e\leq r \leq R$)에서는 응력은 항복 강도에 수렴한다.
$$ \tau = \tau_y $$
전체 토크는 미소 면적 $dA$에 작용하는 미소 토크를 적분해서 얻을 수 있다.
$$ T = \int_A \tau rdA $$
이때 미소 면적은 반경 $r$이고 두께가 $dr$인 껍질로 생각할 수 있다.
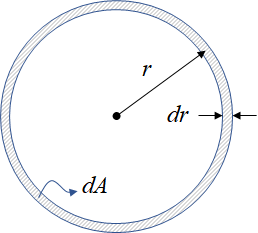
이제 적분해서 전체 토크를 구해보자.
\begin{align} T &= \int_A \tau rdA \\\\ &= \int_0^{r_e} \frac{r}{r_e}\tau_y\cdot r(2\pi rdr) + \int_{r_e}^{R} \tau_y\cdot r (2\pi rdr) \\\\ &= 2\pi\frac{\tau_y}{r_e}\int_0^{r_e}r^3dr + 2\pi\tau_y \int_{r_e}^{R} r^2 dr \end{align}
위의 적분식을 풀어 보면 아래와 같다.
\begin{align} T &= 2\pi\frac{\tau_y}{r_e}\left[ \frac{r^4}{4} \right]_0^{r_e} + 2\pi\tau_y\left[ \frac{r^3}{3} \right]_{r_e}^{R} \\\\ &= \frac{\pi}{2}r_e^3\tau_y + \frac{2\pi}{3}(R^3-r_e^3)\tau_y \\\\ &= \frac{2}{3}\pi R^3\tau_y - \frac{\pi}{6}r_e^3\tau_y \\\\ &= \frac{\pi}{6}(4R^3-r_e^3)\tau_y \end{align}
따라서 탄소성 상태의 토크는 아래처럼 쓰고 이 것이 축에 작용하는 토크의 일반식이 된다.
$$ \therefore T = \frac{\pi}{6}\tau_y(4R^3-r_e^3) $$
3.3 완전 소성 상태 (Fully Plastic State)
이제 축의 모든 영역이 소성이 된 경우를 생각해보자. 재료 모델이 항복 응력 이상을 허용하지 않으므로 모든 반경에서 응력은 전단 항복 강도가 된다.

전체 토크는 아래 적분식을 풀어서 구할 수 있다.
$$ T = \int_A \tau_y\cdot rdA $$
그렇지만 위에서 구한 탄소성 상태의 토크 일반식에서 $r_e \rightarrow 0$으로 놓으면 완전 소성 상태를 쉽게 구할 수 있다.
$$ T_p = \lim_{r_e \rightarrow 0} \frac{\pi}{6}(4R^3-r_e^3)\tau_y $$
$$ \therefore T_p = \frac{2}{3}\pi R^3\tau_y $$
여기에서 $T_p$ 소성 토크(plastic torque)라고 하며 한계 토크(limit torque)를 의미하는 $T_L$, 또는 극한 토크(ultimate torque)를 의미하는 $T_u$로 쓰기도 한다. 다 같은 말이다.
탄성 한계 상태가 되는 항복 토크는 위에서 구했지만 축에 작용하는 토크의 일반식에서 $r_e \rightarrow R$이 되면 항복 토크가 되어 앞서 구한 것과 같은 결과를 얻을 수 있다.
항복 토크와 소성 토크의 관계는 다음과 같이 구해볼 수 있다.
$$ \frac{T_p}{T_y} = \frac{\frac{2}{3}\pi R^3\tau_y}{\frac{1}{2}\pi R^3\tau_y} $$
$$ \therefore T_p = \frac{4}{3}T_y $$
소성 토크는 언제나 항복 토크의 1.33배이다.
4. 잔류 응력 (Residual Stress)
이전에 단축 인장에서 소성이 발생한 경우 잔류 응력이 남는 것을 보였다. 단축 부재의 인장에서는 소성이 일단 발생하면 부재 전체가 소성에 빠진다. 왜냐하면 단면에 작용하는 응력이 일정하고 모든 단면이 같은 응력 상태가 되기 때문이다. 따라서 부재가 소성에 들어서면 외부 하중을 대신 받아줄 또다른 부재가 있어야 한다. 그렇지 않으면 소성이 일어난 부재는 더이상 저항하지 못하고 그대로 파단에 이르게 된다.
소성 변형 (Plastic Deformation)
지금까지 재료의 거동이 탄성 영역에 있는 경우만을 생각했으나 소성이 발생하면 앞서 설명한 응력 집중이고 나발이고 의미 없는 이야기가 된다. 응력 집중 계수 선도 역시 탄성 영역만을 고
satlab.tistory.com
마찬가지로 비틀림에 의한 전단 응력이 전단 항복 강도를 초과하면 소성 변형이 발생하고 하중을 제거해도 영구 변형과 잔류 응력이 남게 된다. 이때 잔류 응력은 비틀림 하중을 인가하는 과정과 제하 과정(unloading process)의 중첩(superposition)으로 구할 수 있다. 제하는 탄성 회복하는 과정이므로 제하 응력 크기가 항복 강도를 초과 하더라도 상관하지 않고 후크의 법칙을 따른다.
단축 인장과의 차이점은 단면에 발생하는 응력이 반경 $r$에 따라 다르기 때문에 소성이 발생하더라도 단면 전체가 소성 상태가 되지 않는 것이다. 즉 토크가 커짐에 따라 가장 바깥 부분부터 소성이 시작 되어 내부로 진행되어 영역이 넓어질 뿐이다. 따라서 소성이 시작 되어도 단축 부재처럼 다른 부재가 대신 외력을 받아줄 필요 없이 부재 내부에서 소성 영역이 늘어나고 탄성 영역이 줄어드는 것으로 외력을 부담할 수 있다. 물론 부재가 감당할 수 있는 최대 토크인 소성 토크(plastic torque) 이후에는 다른 부재가 대신 받아줘야 한다.
4.1. 인가 토크 (Loading Torque)
인가 토크는 앞서 구한 탄소성 상태의 토크 일반식을 이용해서 구할 수 있다.
$$ T= \frac{\pi}{6}(4R^3-r_e^3)\tau_y $$
단축 부재가 특정 상태가 될 때까지 인가한 토크가 $T$이다. 이때 부재는 일부 또는 전체에 소성이 발생했을 수 있다. 그리고 완전 탄성 상태로 토크가 $-T$가 되도록 변형시키는 것이 제하 토크 $T_u$가 된다.
$$ T_u = -T $$
4.2. 잔류 응력 (Residual Stress)
잔류 응력은 아래와 같이 구할 수 있다.
\begin{align} \tau_r &= \tau + \tau_u \\\\ \tau_u &= -\frac{Tr}{I_p} \end{align}
탄성 영역($ 0<r<r_e $)일 때 전단 응력은 아래와 같다.
$$ \tau = \frac{r}{r_e}\tau_y $$
소성 영역($ r_e<r<R $)일 때 전단 응력은 아래와 같다.
$$ \tau = \tau_y $$
이때 탄성과 소성의 경계가 되는 $r_e$는 다음과 같이 구할 수 있다.
\begin{align} \gamma &= \beta r = \frac{d\Phi}{dx}\cdot r \\\\ &= \frac{\Phi}{L}\cdot r \\\\ \gamma_y &= \frac{\Phi}{L}\cdot r_e \\\\ \therefore r_e &= \frac{\gamma_y}{\Phi}\cdot L \end{align}
4.3. 잔류 변형률 (Residual Strain)
잔류 변형률은 인가 변형률과 제하 변형률의 합으로 구한다.
\begin{align} \gamma_r &= \gamma + \gamma_u \\\\ \gamma_u &= \frac{\tau_u}{G} = -\frac{Tr}{GI_p} \end{align}
4.4. 잔류 비틀림각 (Residual Torsional Angle)
잔류 비틀림각은 잔류 변형에 해당한다. 마찬가지로 인가 토크에 의한 변형과 제하 토크에 의한 변형을 중첩한다.
\begin{align} \left( \frac{d\Phi}{dx} \right)_r &= \frac{d\Phi}{dx} + \left( \frac{d\Phi}{dx} \right)_u \\\\ &= \frac{\gamma}{r} + \frac{\gamma_u}{r} \\\\ &= \frac{1}{r}\left(\frac{r}{r_e}\cdot\gamma_y\right) + \frac{1}{r}\left(-\frac{Tr}{GI_p}\right) \\\\ \\\\ \therefore \left( \frac{d\Phi}{dx} \right)_r &= \frac{\gamma_y}{r_e} - \frac{T}{GI_p} \\\\ &= \frac{1}{G}\left( \frac{\gamma_y}{r_e} - \frac{T}{I_p}\right) \end{align}




최근댓글