1. 3차원 응력 (3-D Stress)
지금까지 주로 평면 응력 상태 다뤘다. 평면 응력 상태는 두께 방향 응력($\sigma_z$)을 0으로 보고 무시해 2차원 응력으로 단순화한 것이다. 3차원 응력은 $z$ 방향 응력 성분이 있을 뿐 크게 다를 것은 없다. 3차원 응력은 아래처럼 3x3 행렬로 응력 텐서(stress tensor)를 쓴다.
$$\begin{bmatrix} \sigma \end{bmatrix} = \begin{bmatrix}\sigma_x & \tau_{xy} & \tau_{xz} \\ \tau_{xy} & \sigma_y & \tau_{yz} \\ \tau_{zx} & \tau_{zy} & \sigma_z \end{bmatrix}$$
공액 전단 응력은 아래와 같다.
\begin{align} \tau_{xy} &= \tau_{yx} \\\\ \tau_{xz} &= \tau_{zx} \\\\ \tau_{yz} &= \tau_{zy} \end{align}
2. 응력의 불변량 (Stress Invariants)
2.1. 응력의 제1 불변량 (First Invariant of Stress)
어느 방향에서 바라보나 수직 응력의 합은 항상 같다. 즉 좌표축의 회전에 무관하게 수직 응력의 합은 일정하다.
$$ I_1 = \sigma_x + \sigma_y + \sigma_z $$
2.2. 응력의 제2 불변량 (Second Invariant of Stress)
2차원 응력 상태의 판별식 합은 항상 같다.
$$ I_2 = \begin{vmatrix} \sigma_x & \tau_{xy} \\ \tau_{yx} & \sigma_y \end{vmatrix} + \begin{vmatrix} \sigma_y & \tau_{yz} \\ \tau_{zy} & \sigma_z \end{vmatrix} + \begin{vmatrix} \sigma_x & \tau_{xz} \\ \tau_{zx} & \sigma_z \end{vmatrix} $$
2.3. 응력의 제3 불변량 (Third Invariant of Stress)
응력 텐서의 판별식은 항상 같다.
$$ I_3 = \det\begin{bmatrix} \sigma \end{bmatrix} = \begin{bmatrix}\sigma_x & \tau_{xy} & \tau_{xz} \\ \tau_{xy} & \sigma_y & \tau_{yz} \\ \tau_{zx} & \tau_{zy} & \sigma_z \end{bmatrix} $$
3. 주응력 (Principal Stress)
주응력은 다음 방정식의 근을 찾는다. 세개의 실근 중에 제일 큰 것이 최대 주응력 $\sigma_1$이고 제일 작은 것이 최소 주응력 $\sigma_3$가 된다.
$$ \sigma^3 - I_1\sigma^2 + I_2\sigma - I_3 = 0 $$
4. 응력의 변환 (Stress Transformation)
응력의 변환은 다음과 같이 계산한다. 평면 응력의 변환에서 한 번 다룬 적이 있다.
$$ \begin{bmatrix} \sigma ' \end{bmatrix} = \begin{bmatrix} \sigma_{x'} & \tau_{x'y'} & \tau_{x'z'} \\ \tau_{y'x'} & \sigma_y ' & \tau_{y'z'} \\ \tau_{z'x'} & \tau_{z'y'} & \sigma_z ' \end{bmatrix} = [\text{T}][\sigma][\text{T}]^\text{T} $$
여기에서 $[\text{T}]$는 좌표 변환 행렬(coordinate transformation matrix)이고 $l_{x'x}$는 $x'$축과 $x$축이 이루는 각도에 대한 방향 여현(direction cosine)이다.
$$ \begin{bmatrix} \text{T} \end{bmatrix} = \begin{bmatrix} l_{x'x} & l_{y'x} & l_{z'x} \\ l_{x'y} & l_{y'y} & l_{z'y} \\ l_{x'z} & l_{y'z} & l_{z'z} \end{bmatrix}^\text{T} $$
$$\text{where, } l_{x'x} = \cos(x',x)$$
다른 방법으로 아인슈타인 표기법(Eistein's notation)을 이용해 계산할 수 있다. 이 방법은 텐서 연산에서 사용하는 방법으로 한 항에서 두 번 등장하는 중복된 인덱스(index)는 dummy index라고 부르고 모든 인덱스 조합의 합을 의미한다. 예를 들면 아래처럼 모든 경우를 더하는 것이다.
$$ a_ib_i = \sum_{n=1}^{N}{a_ib_i} = a_1b_1 + a_2b_2 \cdots a_Nb_N $$
이 표기법을 이용하여 쓰면 응력의 변환은 다음과 같다. 전개해보면 행렬을 이용한 변환식과 동일한 결과를 얻을 수 있다. 아는 척하고 싶을 때나 어려운 내용으로 보이고 싶을 때 쓰면 효과가 좋다.
$$ \sigma_{\alpha\beta} = l_{\alpha i}l_{\beta j}\sigma_{ij} $$
\begin{align} \text{where, } &\alpha,\ \beta = x',\ y',\ z' \\\\ &i,\ j = x,\ y,\ z, \end{align}
5. 최대 전단 응력 (Maximum Shear Stress)
최대 전단 응력은 주응력과의 관계를 이용해 구한다.
\begin{align} \tau_1 &= \frac{1}{2}|\sigma_2 - \sigma_3| \\\\ \tau_2 &= \frac{1}{2}|\sigma_3-\sigma_1| \\\\ \tau_3 &= \frac{1}{2}|\sigma_1-\sigma_2| \end{align}
$$ \tau_{\text{max}} = \max(\tau_1, \tau_2, \tau_3) $$
6. 모어 원 (Mohr's Circle)
모어 원을 이용해 주응력이나 최대 전단 응력, 또는 주평면 등을 구할 수 있다. 3차원 응력계에서는 xy면, xz면, 그리고 yz면에 대해 각각 모어 원을 그리면 된다. 세개의 주응력이 $\sigma$ 축에서 절편이고 아래 그림 1처럼 주응력을 절편으로 하는 원을 세 개 그리면 최대 전단응력이 $\tau_2$라는 것을 쉽게 알 수 있다.

7. 평면 응력 상태 (Plane Stress State)
익숙한 평면 응력 상태에 위의 일반 응력 접근법을 적용해보자.
$$ \sigma_z =0,\quad \tau_{xz}=\tau_{zy}=0 $$
7.1 응력 텐서
응력 텐서는 아래처럼 단순해진다.
$$ \begin{bmatrix} \sigma \end{bmatrix} = \begin{bmatrix} \sigma_{x} & \tau_{xy} & \tau_{xz} \\ \tau_{yx} & \sigma_y & \tau_{yz} \\ \tau_{zx} & \tau_{zy} & \sigma_z \end{bmatrix} = \begin{bmatrix} \sigma_{x} & \tau_{xy} & 0 \\ \tau_{yx} & \sigma_y & 0 \\ 0 & 0 & 0 \end{bmatrix} \Rightarrow \begin{bmatrix} \sigma_{x} & \tau_{xy} \\ \tau_{yx} & \sigma_y \end{bmatrix} $$
7.2. 응력 불변량
응력 불변량은 아래처럼 구해진다.
\begin{align} I_1 &= \sigma_x + \sigma_y \\\\ I_2 &= \begin{vmatrix} \sigma_{x} & \tau_{xy} \\ \tau_{yx} & \sigma_y \end{vmatrix} \\\\ &= \sigma_x\sigma_y-\tau_{xy}^2 \\\\ I_3 &= 0 \end{align}
7.3 응력의 변환
응력의 변환은 아래처럼 구할 수 있다.
$$ \begin{bmatrix} \sigma_{x'} & \tau_{x'y'} \\ \tau_{y'x'} & \sigma_y ' \end{bmatrix} = \begin{bmatrix} \cos\theta & \sin\theta \\ -\sin\theta & \cos\theta \end{bmatrix} \begin{bmatrix} \sigma_{x} & \tau_{xy} \\ \tau_{yx} & \sigma_y \end{bmatrix} \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix} $$
또는 아인슈타인 표기법을 이용하면,
\begin{align} \sigma_x' &= l_{x'x}l_{x'x}\sigma_y + l_{x'x}l_{x'y}\tau_{xy} + l_{x'y}l_{x'y}\sigma_y + l_{x'y}l_{x'x}\tau_{yx} \\\\ &= \cos^2\theta\sigma_x + \cos\theta\sin\theta\tau_{xy} + \sin^2\theta\sigma_y + \sin\theta\cos\theta\tau_{yx} \\\\ &= \sigma_x\cos^2\theta + \sigma_y\sin^2\theta + 2\tau_{xy}\sin\theta\cos\theta \end{align}
7.4. 주응력
다음 특성 방정식에 앞서 구한 불변량을 대입하고 해를 구한다.
$$ \sigma^3 - I_1\sigma^2 + I_2\sigma - I_3 = 0 \\\\ \Rightarrow \sigma^3 -(\sigma_x + \sigma_y)\sigma^2 +(\sigma_x\sigma_y - \tau^2_{xy})\sigma - 0 = 0$$
$\sigma$를 밖으로 꺼내면,
$$ \sigma[\sigma^2 -(\sigma_x + \sigma_y)\sigma +(\sigma_x\sigma_y - \tau^2_{xy})] =0 $$
근의 공식을 이용해 근을 구하면 다음과 같다.
\begin{align} \sigma_3 &= 0 \\\\ \sigma_{1,2} &= \frac{(\sigma_x+\sigma_y) \pm \sqrt{(\sigma_x+\sigma_y)^2 - 4(\sigma_x\sigma_y - \tau_{xy}^2)}}{2} \\\\ &= \frac{1}{2}(\sigma_x+\sigma_y)\pm\sqrt{\frac{1}{4}(\sigma_x-\sigma_y)^2 + \tau^2_{xy}} \end{align}
7.5 최대 전단 응력
최대 전단 응력은 다음 중 제일 큰 값이 된다.
\begin{align} \tau_1 &= \frac{1}{2}|\sigma_2 - \sigma_3| = \frac{1}{2}\sigma_2 \\\\ \tau_2 &= \frac{1}{2}|\sigma_3-\sigma_1| = \frac{1}{2}\sigma_1 \\\\ \tau_3 &= \frac{1}{2}|\sigma_1-\sigma_2| \end{align}
$$ \tau_{\text{max}} = \max(\tau_1, \tau_2, \tau_3) $$
7.6. 모어 원
평면 응력을 3차원 응력 상태로 보고 모어 원을 그려보면 다음과 같다.

7.7. 주의할 점
만약 2차원 응력으로 구한 최대 최소 주응력이 모두 양수면 어떻게 될까? 예를 들면 박판 압력 용기의 경우 정수압을 받기 때문에 수직 응력만 존재하고 이 수직 응력은 모두 양수가 될 것이다. 일단 모어 원을 그려 보자.
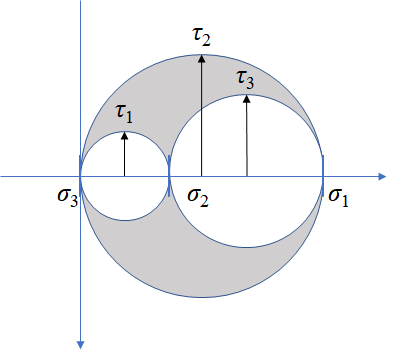
그림 3과 같이 두 개의 주응력이 모두 양수인 경우에는 숨겨져 있던 두께 방향 응력 $\sigma_z = \sigma_3$를 고려 해야 한다. 사실 이런 경우에는 최소 주응력이 두께 방향 응력이 된다. 따라서 최대 전단 응력도 공식으로 구한 $\sigma_{1,2}$를 이용해 구하는 것이 아니라 숨겨진 응력을 잊지 말고 $\sigma_{1,3}$을 이용해 구해야 한다.




최근댓글